In automation, robotics, and industrial testing, understanding the difference between force and torque sensors is essential for choosing the right measurement tool.
Though both measure mechanical loads, they serve different purposes, operate in distinct ways, and are used in different parts of a system.
This article explains how force and torque sensors differ in principle, structure, application, and selection—so you can make better design and integration decisions.
1. What Is a Force Sensor?
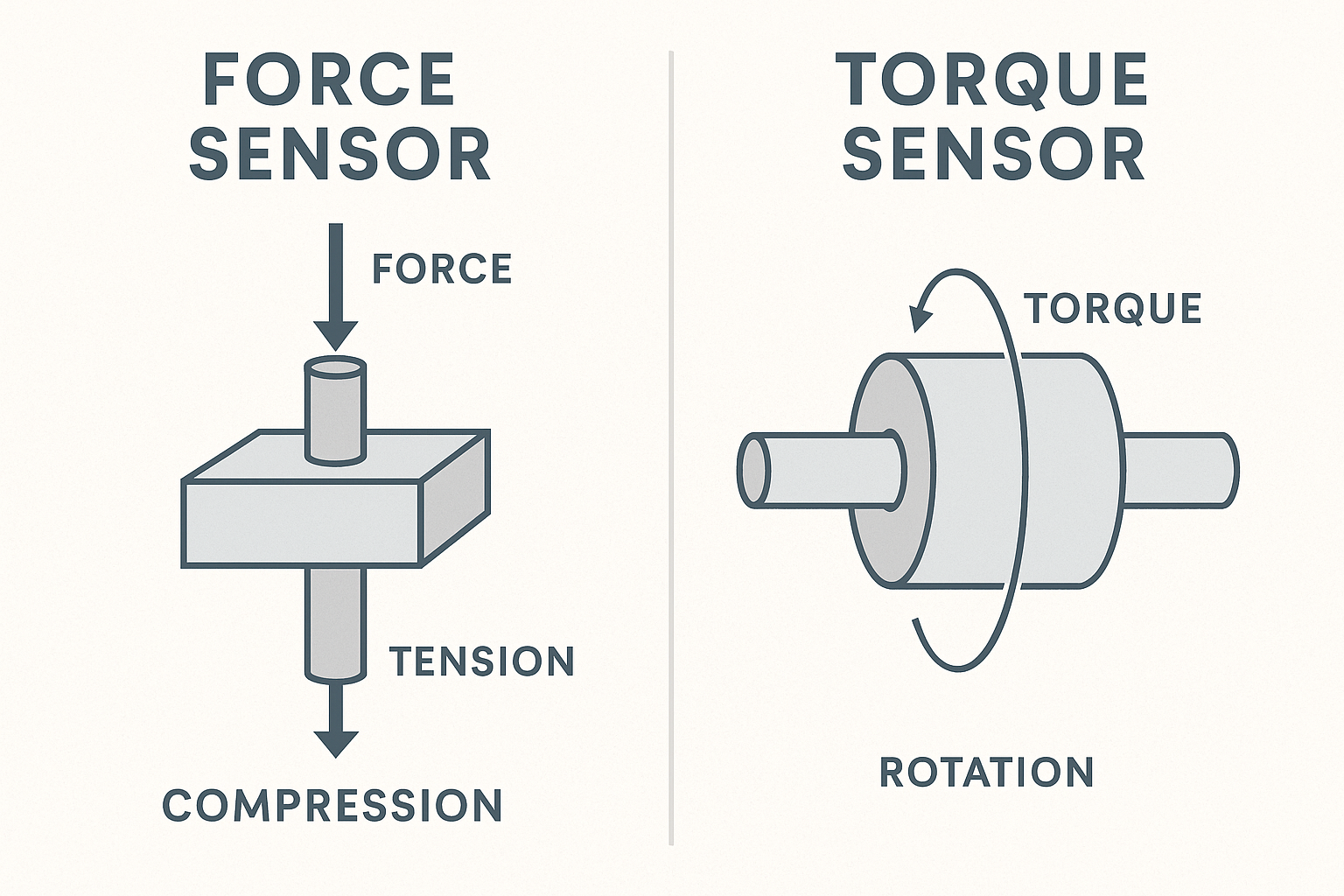
A force sensor measures linear force along a straight line—typically tension (pulling) or compression (pushing). It converts mechanical force into an electrical signal proportional to the load.
📌 Common Measurement Units:
Newtons (N)
Kilograms-force (kgf)
Pounds-force (lbf)
🧰 Typical Applications:
Load cells in weighing systems
Robotic grippers
Press-fit force verification
Structural or material testing
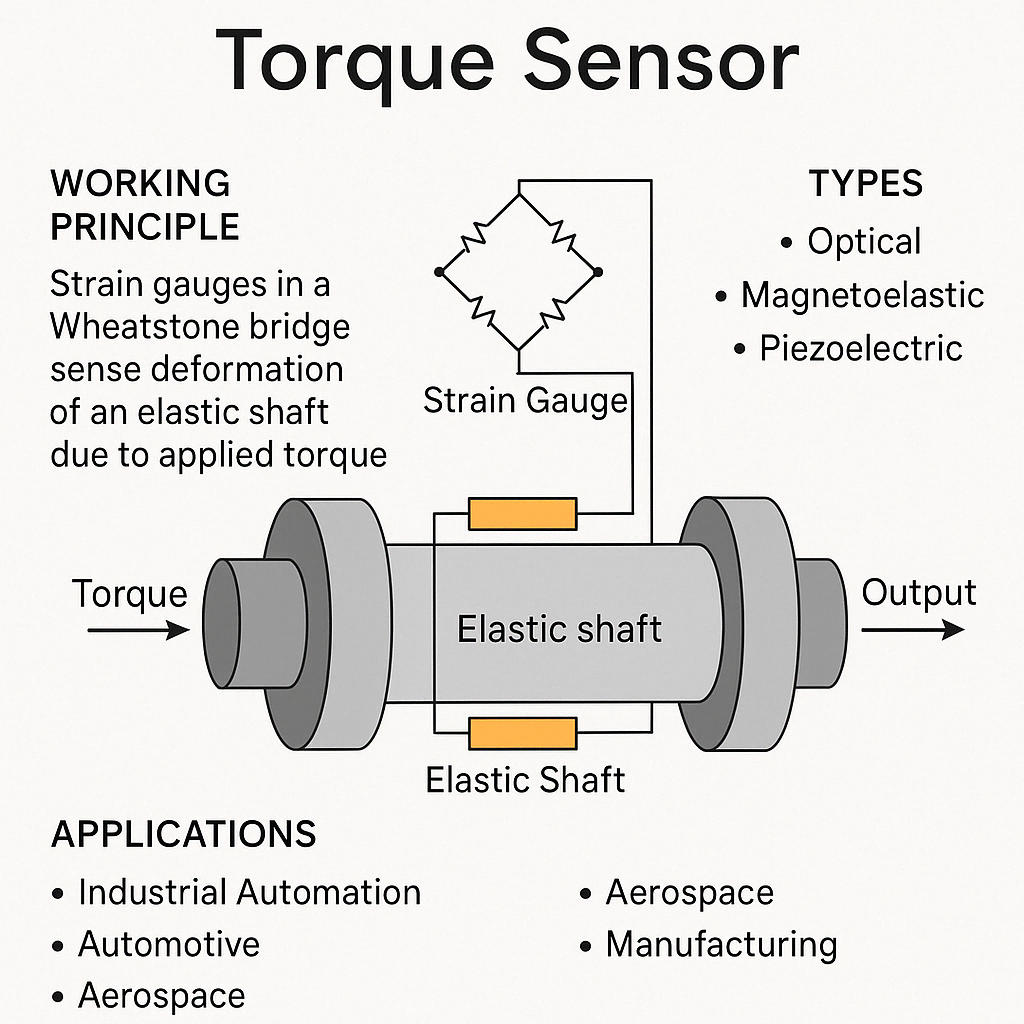
2. What Is a Torque Sensor?
A torque sensor measures rotational force applied about an axis. Also known as a torque transducer, it outputs a signal proportional to the twisting moment.
📌 Common Measurement Units:
Newton-meters (Nm)
Pound-inches (lbf·in)
🧰 Typical Applications:
Electric motor or gearbox testing
Tool torque calibration (e.g., screwdrivers)
Robotic joint monitoring
Automotive engine performance analysis
3. Key Differences at a Glance
Feature
Force Sensor
Torque Sensor
Measured Quantity
Linear load (push or pull)
Rotational load (twisting moment)
Direction
Single axis (axial)
Rotational around shaft or axis
Output Signal
Analog (mV/V, 4–20 mA), Digital
Same; some include encoder outputs
Mounting Location
Between structure and load
Inline with shaft or rotating component
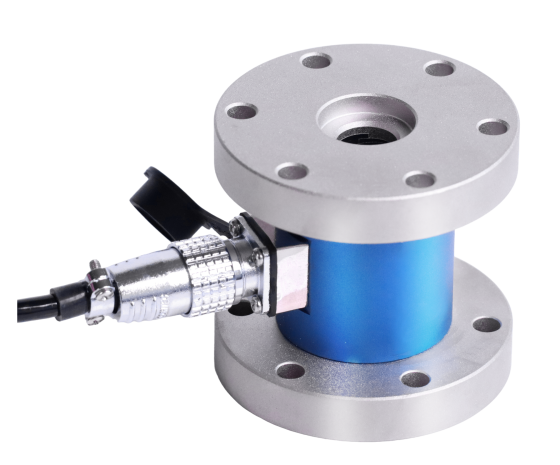
Typical Form Factor
Beam, S-type, pancake
Shaft-style, flange-type, rotary body
Calibration Units
N, kgf, lbf
Nm, oz·in, lbf·in
4. How to Choose Between Them
If your application involves…
You need a…
Weighing an object
Force Sensor
Measuring how tightly a screw is fastened
Torque Sensor
Measuring grip strength of a robotic gripper
Force Sensor
Monitoring rotational load on a motor shaft
Torque Sensor
Pressing or clamping force in assembly equipment
Force Sensor
Rotational compliance control in robot joints
Torque Sensor
5. Can They Be Used Together?
Absolutely.
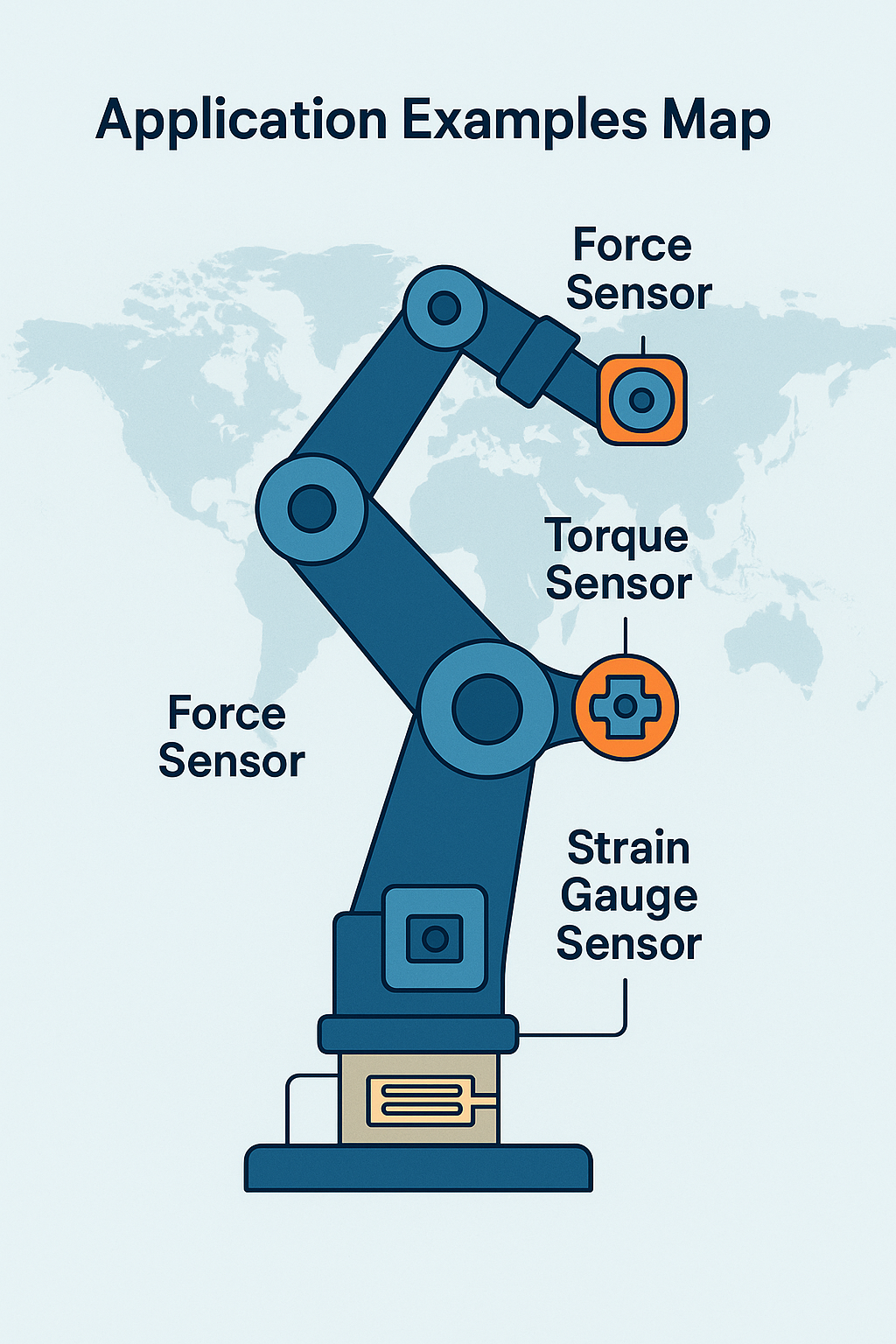
In complex systems such as:
Robotic arms
Servo-controlled testing rigs
Surgical robots …it’s common to use both force and torque sensors simultaneously to monitor and control motion in all degrees of freedom.
6-axis F/T sensors even combine both in one unit—measuring:
Fx, Fy, Fz (forces)
Mx, My, Mz (torques)
6. Final Thoughts
While force and torque sensors both belong to the family of mechanical transducers, their differences lie in the type of mechanical load, installation location, and application focus.
👉 Use force sensors for linear actions like pressing, lifting, or gripping. 👉 Use torque sensors when rotation, twisting, or turning forces need to be measured or controlled.
Choosing the correct one improves not only measurement accuracy but also the safety, performance, and intelligence of your system.