Setpoint (SP): Desired target value (e.g., temperature, flow rate).
Process Variable (PV): Real-time value measured by the sensor.
Error (e): The difference between SP and PV (e = SP − PV).
Controller: Computes the control signal based on the error.
Actuator: Adjusts the system based on the controller’s output.
Process (Plant): The physical system being controlled.
2. What is PID Control?
PID (Proportional–Integral–Derivative) control is a fundamental feedback algorithm widely used in industrial automation to minimize error and maintain system stability.
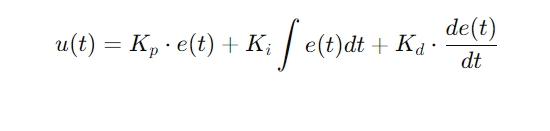
Standard PID Formula:
Where:
u(t): Output signal to the actuator
e(t): Error signal (SP − PV)
Kp,Ki,Kd: Proportional, Integral, and Derivative gains
4. PID Modes and Tuning
4.1 Common Control Modes
Mode
Description
Typical Use
P
Simple, fast, but may leave offset
Position control
PI
Eliminates steady-state error
Temperature, level
PD
Good dynamic response
Speed, robotics
PID
Balanced performance
General purpose
4.2 Tuning Methods
Manual Tuning: Trial and error.
Ziegler-Nichols Method: Based on ultimate gain and oscillation period.
Model-Based Tuning: Uses a mathematical model of the system.
Auto-Tuning: Available in modern controllers.
⚠ Note: Improper tuning may cause oscillations (over-tuned) or sluggish response (under-tuned). Anti-windup and filtering techniques are essential for practical stability.
5. Application Scenarios
5.1 Temperature Control
Uses PID to regulate heating/cooling power.
Example: Electric furnace, HVAC system.
5.2 Motor Speed/Position Control
Adjusts current or PWM to maintain set speed/position.
Example: Fans, CNC, robotics.
5.3 Autonomous Driving
PID used for steering and throttle control in AVs.
Ensures smooth path tracking and stability.
5.4 Other Applications
Liquid level control
Pressure regulation
Auto-focusing systems
High-precision robotics
6. PID Control in DCS and SIS
6.1 In DCS (Distributed Control System)
Widely used in chemical, power, and pharmaceutical industries.
Every process variable (e.g., temperature, pressure, flow) typically has a dedicated PID loop.
SIS is designed for plant and personnel protection.
Normally uses simple logic (ON/OFF or hardwired interlocks).
In special safety control cases (e.g., pressure relief buffering), PID may be adopted.
Key Differences:
Aspect
DCS
SIS
Main Goal
Process control & efficiency
Safety protection
PID Usage
Common & extensive
Rare, only for special cases
Logic Type
Continuous control loops
Discrete logic, simple PID
6.3 Collaboration Between DCS and SIS
Shared data, alarm interlock integration.
DCS PID ensures efficiency, SIS safeguards the system.
7. Conclusion
PID remains the cornerstone of modern industrial control systems due to its:
Simplicity
Robustness
Tunability
Broad compatibility
Despite the emergence of advanced control techniques (adaptive, fuzzy logic), PID continues to dominate in real-world deployments, particularly within DCS environments. Its role in SIS is more limited but still relevant for specific safety-critical adjustments.