As robotics continues to revolutionize manufacturing, healthcare, logistics, and service industries, force sensing has become a critical enabler of safety, precision, and adaptability.
Whether it’s a robot gripping fragile objects, aligning components with tight tolerances, or detecting contact with humans, a properly selected force sensor ensures intelligent, feedback-driven control.
This guide will walk you through the key criteria for selecting the right force sensor for your robotic application.
1. Why Do Robots Need Force Sensors?
Force sensors provide real-time feedback on physical interaction between the robot and its environment. They allow robots to:
Detect and react to contact
Control gripping force to avoid damage
Perform adaptive assembly and part alignment
Maintain consistent pressure in polishing, welding, or gluing
Enable safe human-robot collaboration (HRC)
2. Common Types of Force Sensors in Robotics
Sensor Type
Typical Use
Strain Gauge Load Cells
Gripper force feedback, joint torque monitoring
Piezoelectric Sensors
Dynamic force detection, vibration sensing
6-Axis Force/Torque Sensors
Full 3D force/torque feedback at the end-effector
Capacitive/Optical Tactile Sensors
High-resolution fingertip or contact surfaces
📌 The optimal sensor depends on how many degrees of freedom (DOF) and what kind of interaction your robot needs.
3. Key Factors to Consider
✅ Force Range and Sensitivity
Choose a sensor that covers the expected force range with enough resolution for fine control
For delicate object handling, sensors with low-range, high-sensitivity are preferred
For industrial robots, use sensors rated for higher impact or payload forces
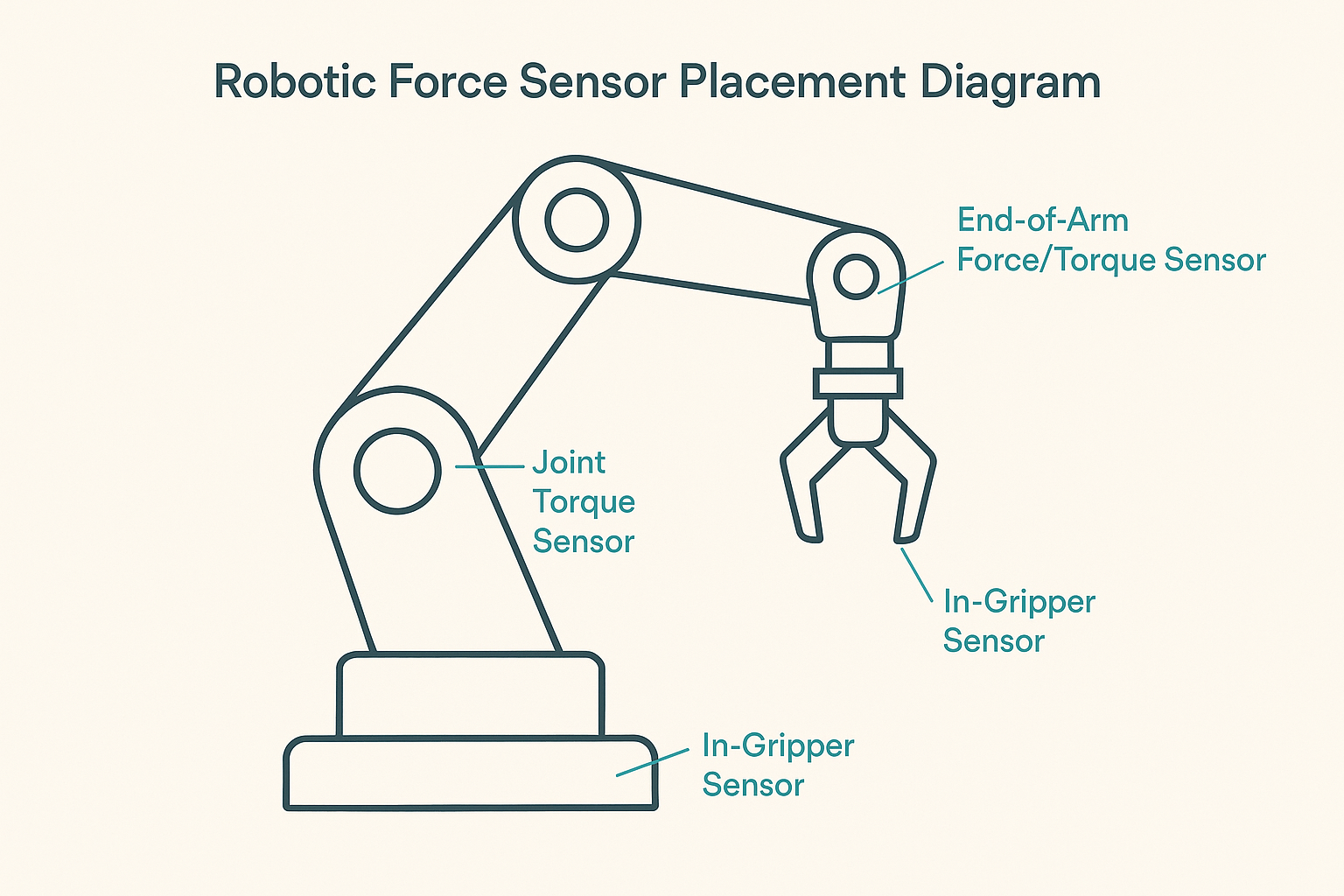
✅ Mounting Location
In-gripper sensors measure grip strength directly
Joint torque sensors provide motion control feedback
End-of-arm 6-axis sensors offer comprehensive contact force data
Make sure the sensor form factor fits your robot’s mechanical design.
✅ Output Signal Type
Analog (mV/V, 0–10V, 4–20mA) for simple integration
Digital (RS485, CAN, EtherCAT) for multi-axis precision control
Match sensor output to your robot controller or PLC input
✅ Dynamic vs. Static Performance
For continuous contact and manipulation, prioritize stability and zero drift
For impact or vibration detection, choose sensors with fast response and high natural frequency
4. Application-Specific Recommendations
Application
Recommended Sensor Traits
Gripping fragile or variable objects
Low-range, compact, analog or digital output
Robotic assembly (press-fit, alignment)
High precision, strain gauge or 6-axis torque sensors
Human-robot collaboration (HRC)
Soft tactile sensors, overload protection
Robotic polishing or sanding
Dynamic force feedback, high-frequency response
Surgical or medical robotics
Ultra-miniature, biocompatible sensors with fine control
5. Environmental and Safety Considerations
Use sealed or IP-rated sensors for dusty or wet environments
Ensure overload protection is built-in or added externally
For mobile or battery-powered robots, prefer low-power, digital-output sensors
Verify compliance with ISO 10218 or ISO/TS 15066 for collaborative safety zones
6. Bonus Tip: Calibration and Software Integration
Choose sensors with factory calibration certificates
Use sensors with available drivers or SDKs for integration into ROS, LabVIEW, or PLCs
Consider sensors with temperature compensation for variable working conditions
Conclusion
Choosing a force sensor for robotics is not just about specs—it’s about understanding the interaction between robot, task, and environment. A well-selected sensor enhances dexterity, increases safety, and unlocks advanced capabilities like compliant control and tactile intelligence.