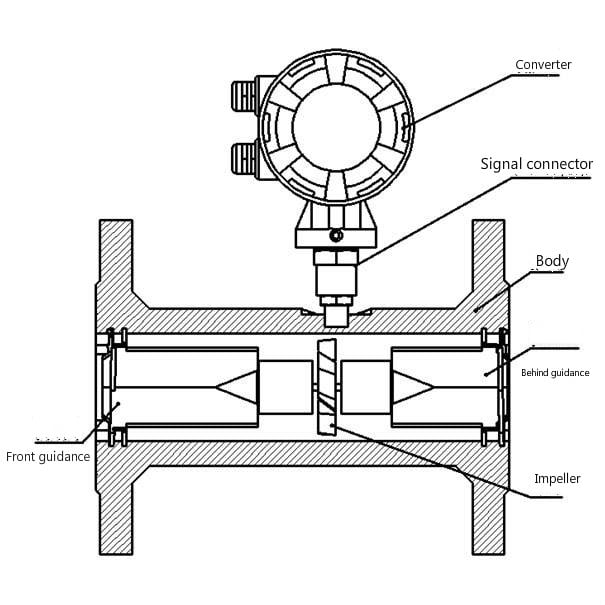
When the measured liquid flows through the sensor, the impeller is forced to rotate under the action of the fluid, and its rotational speed is proportional to the average pipe velocity. The impeller rotating periodically changes the magnetoresistance value of the magnetic circuit, and the magnetic flux in the detecting coil changes periodically, which produces the inductive electromotive force with the same frequency as the blade rotating frequency. After amplification, it is converted and processed.